InteriorGS - 3D Gaussian Semantic Dataset launched by Qunar Technologies
What is InteriorGS?
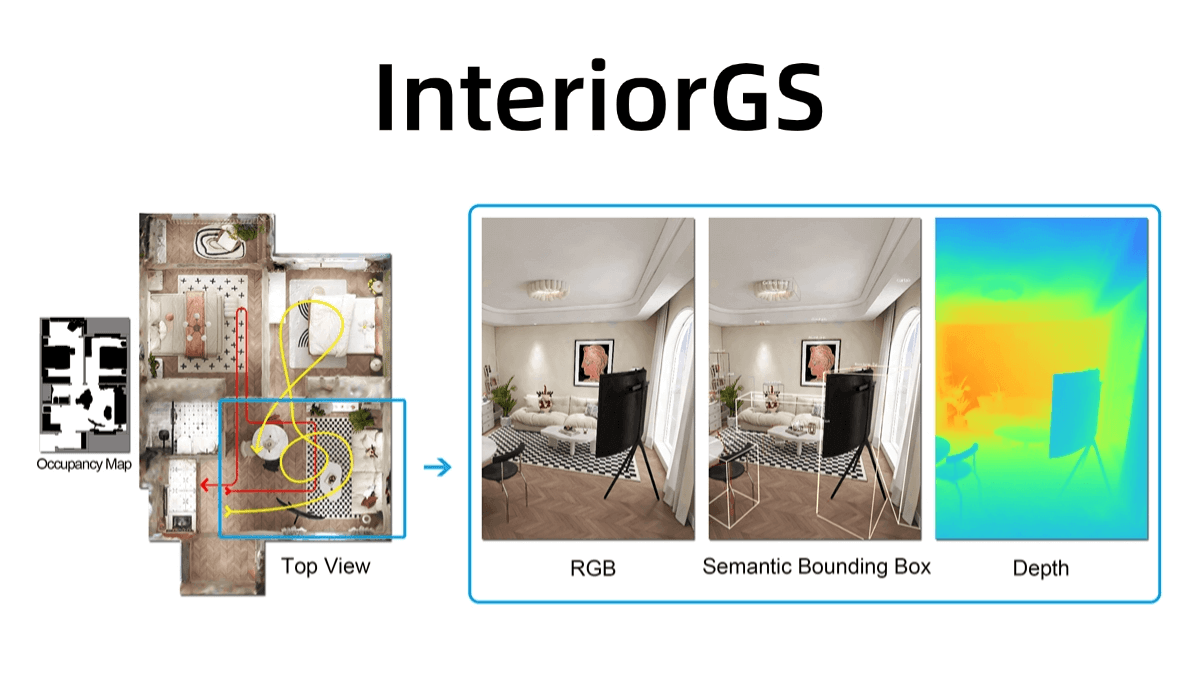
InteriorGS is a high-quality 3D Gaussian semantic dataset introduced by Qunar Technology. The dataset contains 1,000 3D scenes covering more than 80 indoor environments such as homes, convenience stores, wedding halls and museums. The dataset has more than 554,000 object instances in 755 categories, each equipped with 3D frames and semantic annotations, and occupancy maps to support navigation and spatial understanding. The dataset uses 3D Gaussian sputtering to reconstruct the scene, combined with a spatial macromodel to give semantic information, and is the world's first large-scale 3D dataset suitable for free movement of intelligences.InteriorGS provides rich training materials for improving spatial perception of robots and AI intelligences, and the dataset is publicly available on HuggingFace and Github for developers around the world.
Main functions of InteriorGS
- Rich Scene Coverage: Contains 1000 3D scenes covering more than 80 indoor environments such as homes, convenience stores, wedding halls, museums, etc., providing data support for a wide range of application scenarios.
- Fine object labeling: Has more than 554,000 object instances in 755 categories, each labeled with 3D frames and semantic information to help AI models accurately recognize them.
- Spatial comprehension aids: Provide occupancy maps to help intelligences understand spatial layout, support path planning and obstacle avoidance, and enhance navigation capabilities.
- Dynamic environmental adaptation: Supporting the free movement of intelligent bodies in dynamic environments, enhancing their adaptability and flexibility, and meeting the needs of complex scenarios.
- High-quality data assurance: Combined with 3D Gaussian sputtering technology to reconstruct the scene and give semantic information, it provides high-quality material for AI model training and helps model performance improvement.
InteriorGS official website address
- Github repository:: https://github.com/manycore-research/InteriorGS
- HuggingFace Model Library:: https://huggingface.co/datasets/spatialverse/InteriorGS
How to use InteriorGS
- Access to data sets: Visit HuggingFace or GitHub for the InteriorGS dataset.
- Download Dataset: Download the dataset files via the HuggingFace API or clone the GitHub repository.
- Understanding Data Structures: Familiarize yourself with the file structure of the dataset, including 3D scene files, annotation files, and occupancy maps.
- Loading and processing data: Load the scene with 3D tools, parse the labeled files, and process the occupancy map to extract the required information.
- Training with the dataset: Training target detection models with labeled data and developing navigation algorithms in conjunction with occupancy maps.
- Development and Testing: Develop applications based on datasets and test model performance in different scenarios.
InteriorGS core strengths
- Combining large scale with high quality: InteriorGS is the world's first large-scale 3D Gaussian semantic dataset, with a huge number of scenes and objects, and fine labeling and high data quality, providing rich and reliable material for AI model training.
- Technological innovativeness: Advanced 3D Gaussian sputtering technology to reconstruct the scene, combined with spatial macromodeling to give semantic information, which is innovative in the industry and generates a more realistic and accurate 3D scene.
- Dynamic Adaptation: Supporting the free movement of intelligent bodies in dynamic environments, making the dataset applicable to static scene analysis, capable of coping with complex and changing real-world environments, and enhancing the usefulness and flexibility of the dataset.
- Multi-dimensional data support: In addition to 3D scene and semantic annotation, it also provides occupancy maps, and multi-dimensional data support to meet the needs of different application scenarios, such as indoor navigation and spatial layout optimization.
- Openness and sharing: The dataset is publicly available on HuggingFace and GitHub, and the openness allows developers around the world to easily access and use the data, facilitating technology exchange and innovation, and accelerating the development of AI technology.
People for whom InteriorGS is intended
- AI and machine learning researchers: Training and optimizing target detection and spatial perception models with high-density 3D annotation and semantic information to improve AI performance.
- Robotics Engineer: Development of autonomous navigation and dynamic environment adaptation capabilities for robots in complex indoor environments with enhanced dexterity.
- Virtual Reality (VR) and Augmented Reality (AR) Developers: Use 3D scene data to build realistic virtual environments and optimize the user experience.
- Architects and interior designers: Optimize the interior space layout based on occupancy maps and 3D scenes to validate the design solution.
- Smart Home System Developer: Rational deployment of smart devices based on indoor environmental data to improve the environmental understanding of smart home systems.
© Copyright notes
The article is copyrighted and should not be reproduced without permission.

Related articles


No comments...