InteriorGS - Qunar Technologyによる3Dガウス・セマンティック・データセット
インテリアGSとは?
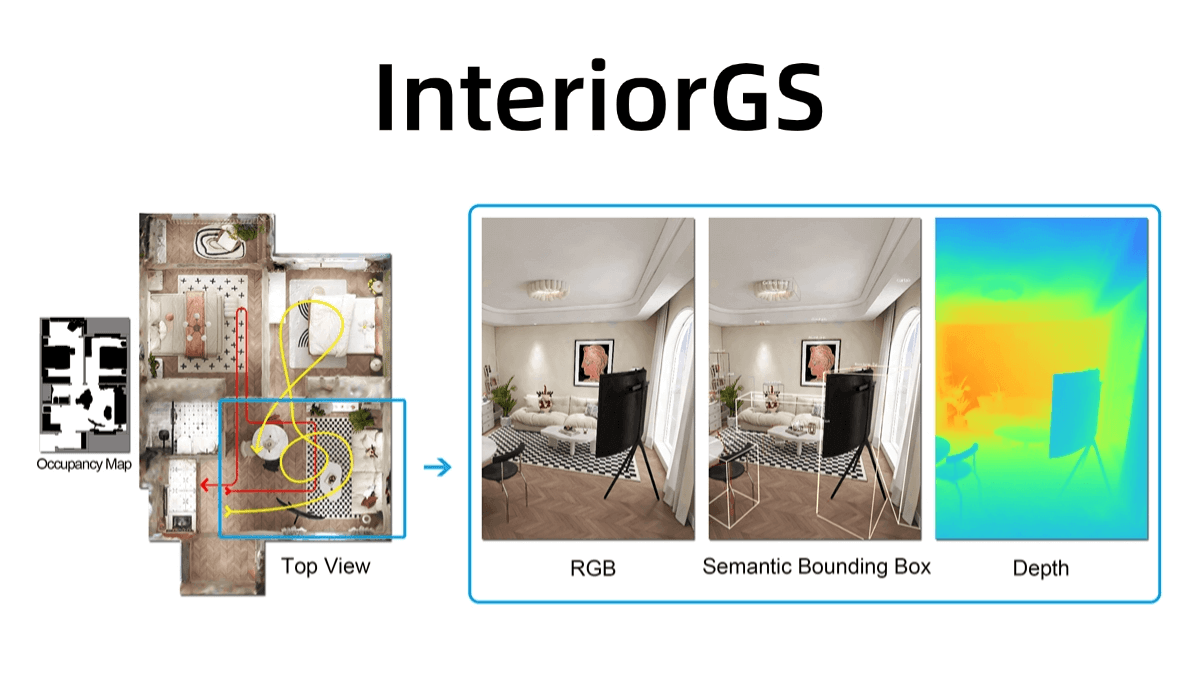
InteriorGSは、Qunar Technologyによって導入された高品質の3Dガウス意味データセットである。このデータセットには、住宅、コンビニエンスストア、結婚式場、美術館など80以上の屋内環境をカバーする1,000の3Dシーンが含まれている。このデータセットには、755のカテゴリに分類された554,000以上のオブジェクトインスタンスがあり、それぞれに3Dフレームと意味的注釈、ナビゲーションと空間理解をサポートする占有マップが備わっている。このデータセットは、3Dガウシアンスパッタリング技術でシーンを再構成し、空間マクロモデルと組み合わせて意味情報を与えることで、知能の自由な動きに適した世界初の大規模3Dデータセットとなっている。InteriorGSは、ロボットやAI知能の空間認識を向上させるための豊富なトレーニング教材を提供し、データセットは世界中の開発者のためにHuggingFaceとGithubで公開されている。
インテリアGSの主な機能
- 豊かな現場取材住宅、コンビニエンスストア、結婚式場、美術館など、80以上の屋内環境を網羅した1000の3Dシーンを収録。
- ファイン・オブジェクト・ラベリング755カテゴリー、554,000以上のオブジェクトインスタンスがあり、それぞれに3Dフレームと意味情報がラベル付けされている。
- 空間理解補助器具インテリジェンスが空間レイアウトを理解し、経路計画や障害物回避をサポートし、ナビゲーション能力を向上させるための占有マップを提供する。
- ダイナミックな環境適応ダイナミックな環境における知的体の自由な動きをサポートし、その適応性と柔軟性を高め、複雑なシーンのニーズに応える。
- 高品質のデータ保証3Dガウシアンスパッタリング技術と組み合わせてシーンを再構成し、意味情報を与えることで、AIモデルのトレーニングに高品質な素材を提供し、モデルの性能向上に役立ちます。
インテリアGS公式ウェブサイトアドレス
- Githubリポジトリ:: https://github.com/manycore-research/InteriorGS
- HuggingFaceモデルライブラリ:: https://huggingface.co/datasets/spatialverse/InteriorGS
インテリアGSの使い方
- データセットへのアクセスHuggingFaceまたはGitHubでInteriorGSデータセットをご覧ください。
- データセットをダウンロードHuggingFace API経由でデータセットファイルをダウンロードするか、GitHubリポジトリをクローンしてください。
- データ構造の理解3Dシーンファイル、アノテーションファイル、占有マップなど、データセットのファイル構造をよく理解すること。
- データの読み込みと処理3Dツールでシーンを読み込み、アノテーションファイルを解析し、必要な情報を抽出するために占有マップを処理します。
- データセットによるトレーニングラベル付けされたデータを使ってターゲット検出モデルをトレーニングし、占有マップと連動したナビゲーション・アルゴリズムを開発する。
- 開発とテストデータセットに基づいてアプリケーションを開発し、さまざまなシナリオでモデルの性能をテストする。
インテリアGSの核となる強み
- 大規模と高品質の融合インテリアGSは、世界初の大規模3Dガウス意味データセットであり、膨大な数のシーンとオブジェクト、精緻なラベリングと高いデータ品質により、AIモデルのトレーニングに豊富で信頼性の高い素材を提供します。
- 技術革新性先進の3Dガウス・スパッタリング技術でシーンを再構成し、空間マクロモデリングと組み合わせて意味情報を与える。
- 動的適応ダイナミックな環境における知的身体の自由な動きをサポートし、静的なシーン解析にも適用可能で、複雑で変化する実環境に対応でき、データセットの有用性と柔軟性を高める。
- 多次元データのサポート3Dシーンとセマンティックアノテーションに加え、占有マップや多次元データサポートも提供し、屋内ナビゲーションや空間レイアウトの最適化など、さまざまなアプリケーションシナリオのニーズに応えます。
- オープンと分かち合いデータセットはHuggingFaceとGitHubで公開されており、このオープン性によって世界中の開発者が簡単にデータにアクセスして利用できるようになり、技術交流とイノベーションが促進され、AI技術の開発が加速される。
インテリアGSの対象者
- AI・機械学習研究者高密度の3Dアノテーションと意味情報を用いたターゲット検出と空間認識モデルの訓練と最適化により、AIのパフォーマンスを向上させる。
- ロボット工学エンジニア複雑な屋内環境におけるロボットの自律航行と動的環境適応能力の開発。
- 仮想現実(VR)および拡張現実(AR)開発者3Dシーンデータを使用して、リアルな仮想環境を構築し、ユーザー体験を最適化します。
- 建築家とインテリアデザイナー占有マップと3Dシーンに基づき、室内空間のレイアウトを最適化し、設計ソリューションを検証します。
- スマートホームシステム開発者室内環境データに基づくスマートデバイスの合理的な展開により、スマートホームシステムの環境理解を向上。
© 著作権表示
この記事は著作権で保護されており、許可なく複製することは禁じられている。

関連記事


コメントはありません